


GRC B102 – Bộ điều khiển robot chuyên dụng với kiến trúc mở cho điều khiển motion và I/O hợp nhất
Nội dung chính

Trong bối cảnh sản xuất hiện đại, doanh nghiệp không chỉ cần robot, mà cần một nền tảng điều khiển linh hoạt, mở và có khả năng tích hợp sâu với hệ thống nhà máy. Đây chính là khoảng trống giữa robot truyền thống và hệ thống tự động hóa thông minh, nơi GRC B102 trở thành một lựa chọn chiến lược.
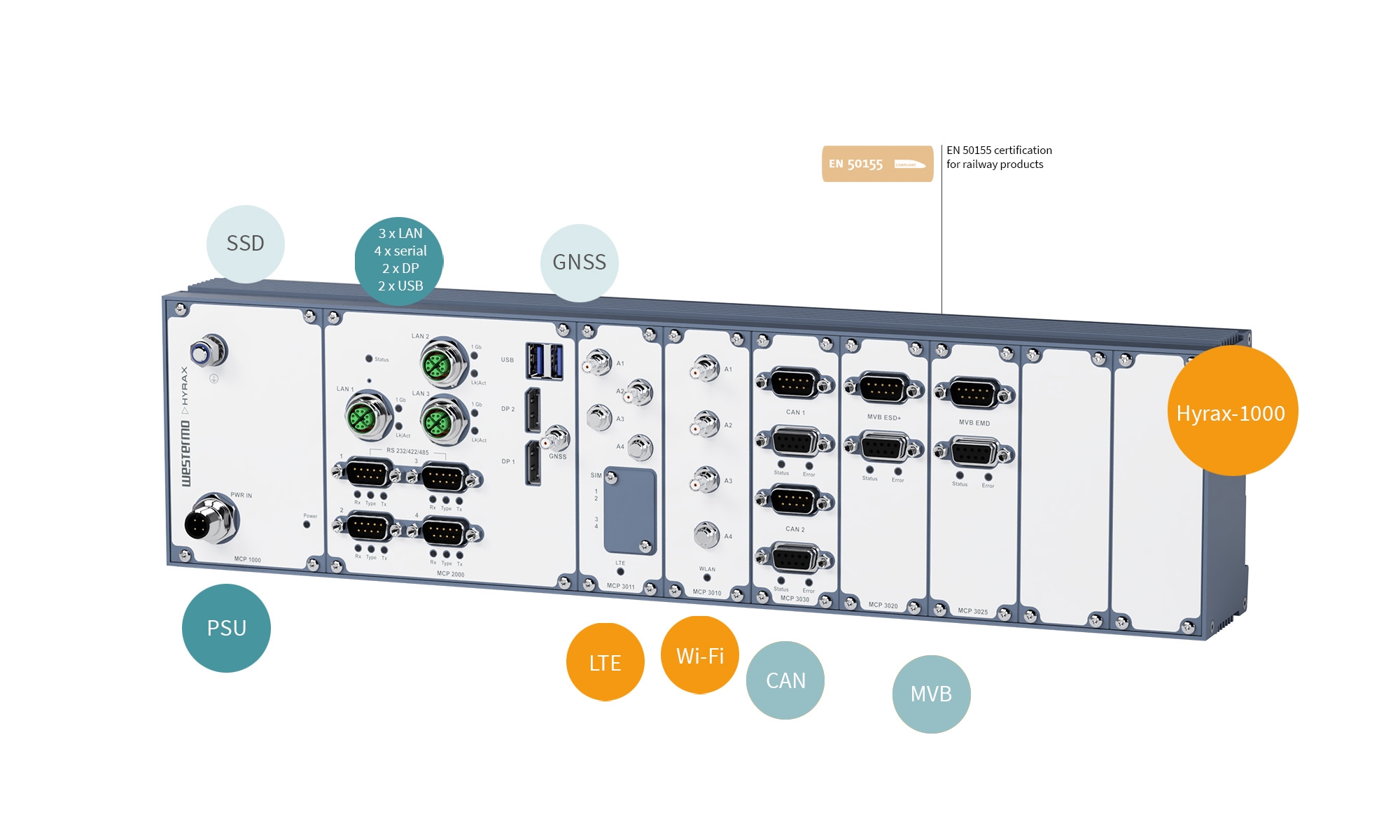
GRC B102 là bộ điều khiển robot dạng bo mạch Mini-ITX, được thiết kế để tích hợp trực tiếp vào tủ điện công nghiệp, cho phép điều khiển nhiều loại robot khác nhau trên cùng một nền tảng. Không giống các controller đóng của từng hãng robot, GRC B102 hướng đến kiến trúc mở, giúp các nhà tích hợp hệ thống (SI/OEM) xây dựng giải pháp tùy biến theo từng ngành.
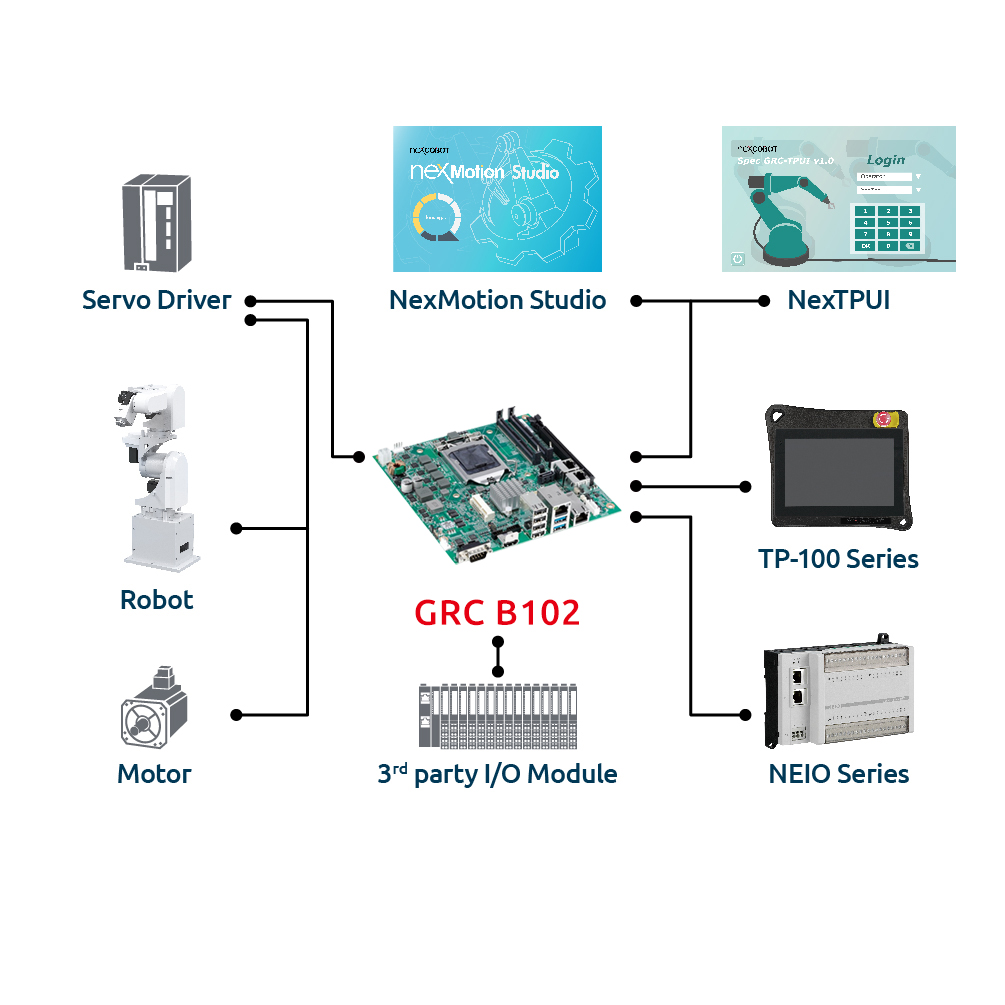
Điểm khác biệt cốt lõi của GRC B102 nằm ở việc nó kết hợp 3 lớp công nghệ trong một nền tảng duy nhất:
1. Lớp điều khiển chuyển động (Motion Control Layer)
GRC B102 hỗ trợ đầy đủ các dạng chuyển động công nghiệp như PTP, linear, arc và contour, cho phép triển khai từ các ứng dụng đơn giản đến phức tạp như nội suy đa trục. Khi kết hợp với EtherCAT – một giao thức truyền thông thời gian thực – hệ thống đạt được độ trễ cực thấp và khả năng đồng bộ chính xác giữa nhiều trục và nhiều robot.
Điều này đặc biệt quan trọng trong các ứng dụng:
- Pick & place tốc độ cao
- Đồng bộ robot – conveyor
- Gia công hoặc dispensing theo quỹ đạo
2. Lớp tích hợp hệ thống (System Integration Layer)
Với các giao thức như Modbus TCP và TCP/IP, GRC B102 không chỉ là controller mà còn đóng vai trò gateway giữa OT và IT. Điều này cho phép:
- Kết nối trực tiếp với MES/SCADA
- Đồng bộ dữ liệu sản xuất
- Triển khai các mô hình smart factory
3. Lớp điều khiển đa robot (Multi-Robot Coordination)
Khả năng điều khiển đồng thời tối đa 4 robot và mở rộng tới 16 trục phụ giúp GRC B102 trở thành nền tảng lý tưởng cho các hệ thống robot cell phức tạp. Thay vì mỗi robot một controller, toàn bộ hệ thống có thể được điều phối từ một trung tâm duy nhất, giảm đáng kể độ phức tạp kiến trúc.
Ưu điểm của bộ điểu khiển robot GRC B102
Điều gì thực sự khác biệt về mặt kỹ thuật?
1. EtherCAT + Motion Control tập trung
Controller (GRC B102)
│
EtherCAT
│
┌──────┼──────────┐
Servo I/O Robot
Drives Modules Axes
Ở đây có một điểm mà rất nhiều khách hàng thường bỏ qua: trong các hệ thống robot truyền thống, mỗi thành phần đều vận hành như một “thế giới riêng”. Robot có controller riêng, conveyor chạy bằng PLC riêng, vision cũng xử lý độc lập. Việc đồng bộ giữa các phần này chủ yếu dựa vào network thông thường, và điều đó gần như chắc chắn tạo ra độ trễ. Hệ thống vẫn chạy được, nhưng luôn tồn tại những sai lệch nhỏ về timing và chính những sai lệch đó làm giảm hiệu suất tổng thể.
Khi chuyển sang GRC B102, cách tiếp cận này thay đổi hoàn toàn. Thay vì tách rời, toàn bộ chuyển động từ robot, servo đến I/O đều nằm trong cùng một hệ thống real-time dựa trên EtherCAT. Điều đó có nghĩa là tất cả các thành phần không còn “giao tiếp qua mạng” theo kiểu thông thường nữa, mà hoạt động như một hệ thống thống nhất, đồng bộ theo thời gian thực.
Kết quả mang lại không chỉ là cải thiện kỹ thuật, mà là thay đổi rõ rệt về hiệu năng: timing chính xác hơn, lỗi đồng bộ gần như được loại bỏ, và quan trọng nhất là tốc độ của toàn hệ thống được tối ưu — không chỉ riêng robot, mà là toàn bộ dây chuyền.
2. Multi-robot control
GRC B102 không chỉ dừng lại ở việc điều khiển một robot đơn lẻ. Nền tảng này cho phép bạn vận hành đồng thời tới 4 robot trong cùng một hệ thống, đồng thời mở rộng thêm đến 16 trục phụ khi cần thiết.
Điều quan trọng không nằm ở con số, mà ở ý nghĩa phía sau: khi hệ thống của bạn cần mở rộng, bạn không phải bổ sung thêm controller hay chia nhỏ kiến trúc điều khiển. Toàn bộ logic vẫn được giữ nguyên trong một nền tảng thống nhất, không cần viết lại từ đầu.
Nhờ đó, việc scale hệ thống trở nên đơn giản và có kiểm soát hơn. Bạn tránh được các “điểm nghẽn tích hợp” thường xuất hiện khi phải ghép nhiều controller lại với nhau, đồng thời duy trì được sự đồng bộ và hiệu năng ổn định cho toàn bộ dây chuyền.
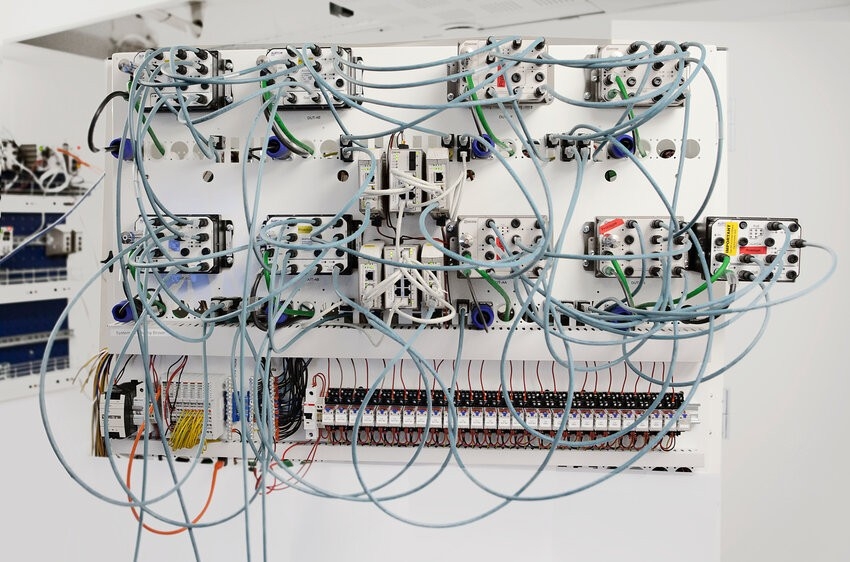
3. Open system
- Giao tiếp TCP/IP, Modbus TCP
- Tích hợp trực tiếp MES / WMS
- Có thể build logic riêng
Ứng dụng của bộ điều khiển robot GRC B102
Bộ điều khiển robot GRC B102 ứng dụng trong ngành Logistics
Trong logistics, rất hiếm khi vấn đề nằm ở việc robot không đủ nhanh. Vấn đề nằm ở việc toàn hệ thống không chạy cùng một nhịp. Một robot có thể đạt tốc độ cao, nhưng nếu conveyor lệch timing hoặc dữ liệu từ WMS cập nhật chậm, toàn bộ hiệu suất sẽ bị kéo xuống.
Điểm khác biệt khi sử dụng GRC B102 không nằm ở từng robot riêng lẻ, mà ở cách hệ thống được điều phối.
Khi controller nắm toàn bộ trạng thái hệ thống theo thời gian thực, việc phân bổ nhiệm vụ không còn mang tính “ước lượng”, mà dựa trên dữ liệu thực tế tại từng thời điểm.
Điều này giúp hệ thống đạt được một thứ quan trọng hơn tốc độ đơn lẻ: throughput thực tế và ổn định.
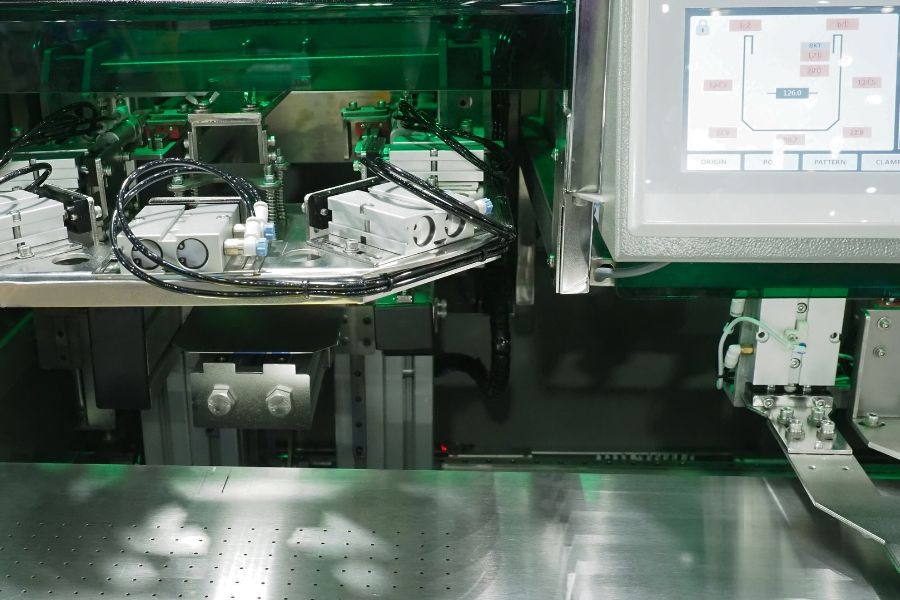
Bộ điều khiển robot GRC B102 ứng dụng trong ngành sản xuất linh kiện điện tử
Trong sản xuất điện tử, sai số không chỉ xuất phát từ cơ khí hay độ chính xác của robot, mà thường đến từ sự không đồng bộ giữa các hệ thống.
Một hệ thống vision có thể nhận diện rất chính xác, nhưng nếu dữ liệu đó không được đưa vào đúng thời điểm trong chu kỳ điều khiển, kết quả cuối cùng vẫn có thể sai lệch. Vấn đề nằm ở “timing”, không phải ở độ chính xác riêng lẻ của từng thành phần.
Khi vision và motion được tích hợp trực tiếp trong cùng một controller như GRC B102, sự lệch pha này gần như được loại bỏ ngay từ cấp kiến trúc. Robot không còn phụ thuộc vào dữ liệu truyền từ bên ngoài qua nhiều lớp trung gian, mà thực thi dựa trên dữ liệu được xử lý ngay trong cùng một chu kỳ điều khiển thời gian thực. Nhờ đó, hệ thống đạt được độ lặp lại (repeatability) ổn định theo thời gian — yếu tố cốt lõi để đảm bảo chất lượng sản xuất nhất quán, đặc biệt trong các quy trình điện tử đòi hỏi độ chính xác cao.
Bộ điều khiển robot GRC B102 ứng dụng trong ngành F&B
Khác với electronics hay logistics, F&B phải xử lý sản phẩm có tính biến động cao. Không có hai sản phẩm hoàn toàn giống nhau, và vị trí của chúng trên băng chuyền cũng không cố định. Trong bối cảnh đó, độ trễ giữa vision và robot trở thành yếu tố quyết định.
Nếu hệ thống phản ứng chậm, doanh nghiệp buộc phải giảm tốc để đảm bảo độ chính xác, đồng nghĩa với giảm năng suất. Với GRC B102, khi vision và robot nằm trong cùng hệ điều khiển, phản ứng của hệ thống diễn ra gần như tức thời. Điều này cho phép vừa giữ được độ chính xác, vừa duy trì tốc độ cao — điều mà kiến trúc phân tán rất khó đạt được.

Bài liên quan

24/06/2026

23/06/2026

20/06/2026

20/06/2026
18/06/2026

13/06/2026
05/06/2026

03/06/2026

02/06/2026

01/06/2026

27/05/2026

25/05/2026

23/05/2026

22/05/2026

21/05/2026
18/05/2026
18/05/2026

18/05/2026
16/05/2026

16/05/2026
15/05/2026

13/05/2026

08/05/2026

28/04/2026

25/04/2026

23/04/2026

21/04/2026
20/04/2026

16/04/2026

15/04/2026

14/04/2026

11/04/2026

10/04/2026

07/04/2026

07/04/2026

07/04/2026

06/04/2026

02/03/2026

12/02/2026

11/02/2026
05/02/2026

30/01/2026

29/01/2026

28/01/2026

27/01/2026

23/01/2026

22/01/2026

20/01/2026

17/01/2026

15/01/2026

15/01/2026

06/01/2026
02/01/2026

02/01/2026

29/12/2025

24/12/2025

22/12/2025

09/12/2025

08/12/2025

02/12/2025

26/11/2025

25/11/2025

20/11/2025

14/11/2025

13/11/2025

13/11/2025

10/11/2025

08/11/2025

07/11/2025

06/11/2025

05/11/2025

01/11/2025

31/10/2025

30/10/2025

30/10/2025
29/10/2025

29/10/2025
28/10/2025

17/10/2025

26/09/2025

05/09/2025

04/09/2025

28/08/2025

27/08/2025

21/08/2025
21/08/2025
20/08/2025

19/08/2025

12/08/2025

05/08/2025

04/08/2025

08/07/2025

01/07/2025

30/06/2025

25/06/2025

21/06/2025
20/06/2025

18/06/2025

11/06/2025

05/06/2025

23/05/2025

21/05/2025

19/05/2025

15/05/2025

10/05/2025

09/05/2025

08/05/2025

24/04/2025

23/04/2025

21/04/2025

19/04/2025

17/04/2025

10/04/2025

10/04/2025

09/04/2025

02/04/2025

02/04/2025

01/04/2025

31/03/2025

31/03/2025

26/03/2025

25/03/2025

25/03/2025

22/03/2025

22/03/2025

21/03/2025

21/03/2025

20/03/2025

20/03/2025

20/03/2025

19/03/2025

13/03/2025

07/03/2025

06/03/2025

05/03/2025

04/03/2025

28/02/2025

27/02/2025

25/02/2025

20/02/2025

13/02/2025

11/02/2025

07/02/2025

06/02/2025

05/02/2025

04/01/2025

20/06/2024

13/06/2024

04/06/2024

03/06/2024

23/03/2024

21/03/2024

11/03/2024

04/03/2024

01/03/2024

29/02/2024

28/02/2024

27/02/2024

27/02/2024

30/11/2023

30/11/2023

30/11/2023

30/11/2023

30/11/2023

30/11/2023

30/11/2023

29/03/2018

29/11/2023

29/11/2023

29/11/2023

29/11/2023

29/11/2023

24/11/2023

24/11/2023

24/11/2023

24/11/2023

24/11/2023

24/11/2023

23/11/2023

23/11/2023

30/12/2022

06/11/2023